Dhruv Patel
About me
I am an MS Robotics student at the School of Interactive Computing, Georgia Tech. I currently conduct research on Cross-Embodiment Learning for Robot Manipulation from Human-Play data at the Robot Learning and Reasoning (RL2) lab with Dr. Danfei Xu . Presently, I am working on extending our recent work, EgoMimic (CoRL 2024) for diverse multi-task settings and various axes of generalization (behavior, scene), exploring Vision-Language Models (VLMs) and large-scale embodied human datasets. My interests broadly lie at the intersection of Robotics, Computer Vision and Deep Learning.
UPDATE: I am actively seeking full-time opportunities in AI/Robotics starting May 2025 — feel free to reach out if there's a fit!
I spent summer 2024 interning at Honda Research Institute, USA, working on Scene Understanding for Autonomous Driving at Intersections. Before Georgia Tech, I explored open-source software development as a Google Summer of Code'23 contributor at Unify AI, with an aim to optimize SLAM for real-world deployment in Robotics applications. Prior to this, I was a Project Associate at the Robotics Research Centre (RRC), where I worked on Scene Understanding for Autonomous Driving in Adverse Weather Conditions
(affiliated with Queensland University of Technology (QUT)
and
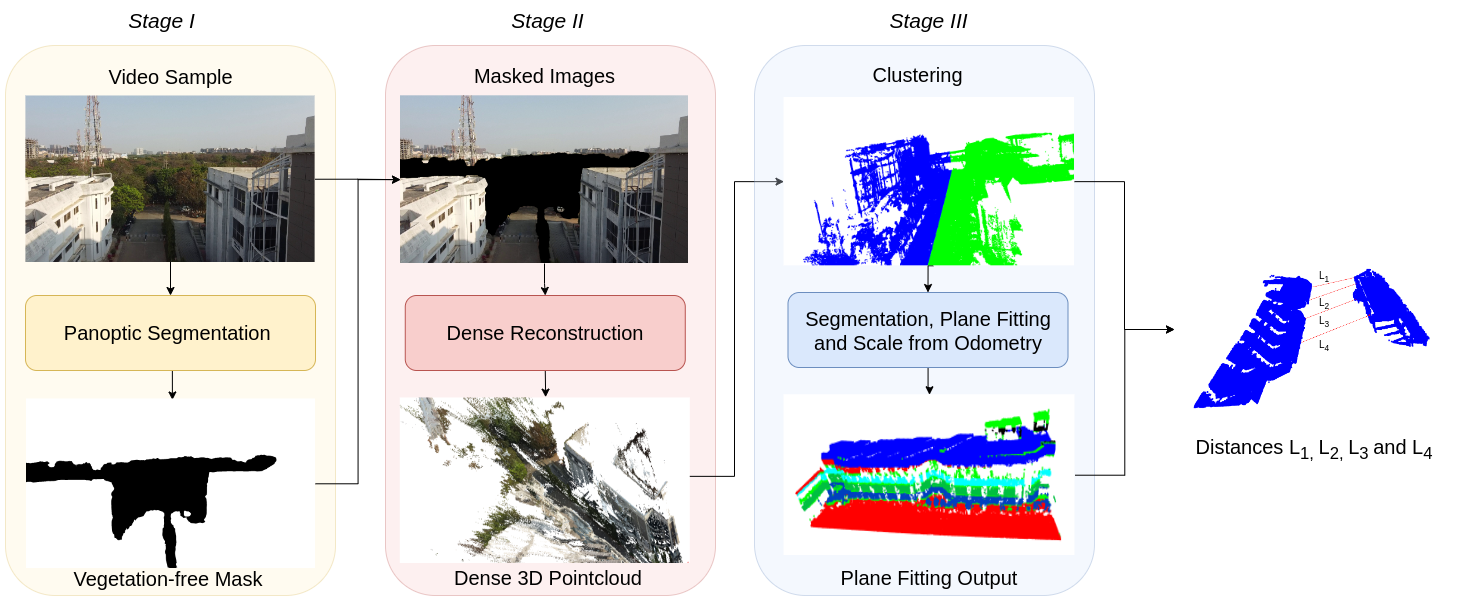
ZF Group, and spearheaded the IHub Project Mobility on UAV-based Visual Remote Sensing for Civil Infrastructure Safety Assessment.
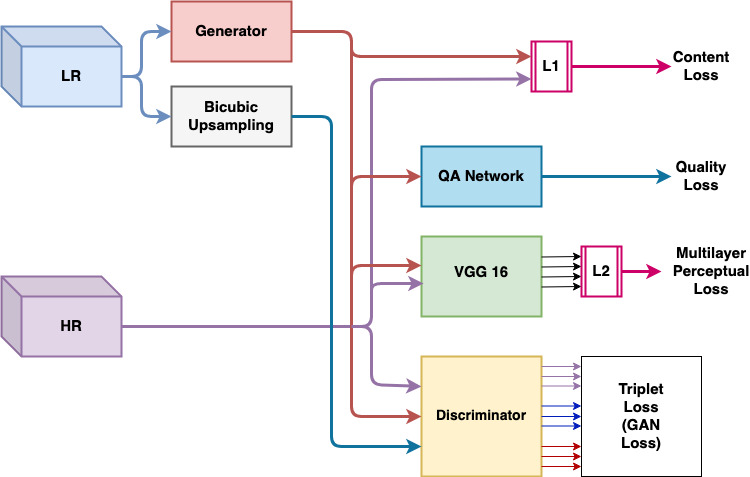
I spent the summer of 2020 working on Simultaneous Localization and Mapping (SLAM) for Level-5 Autonomy at Swaayatt Robots. Post this, I transitioned to a Software Engineering role at Amdocs, and alongside, collaborated with the Norwegian Biometrics Laboratory (NTNU, Norway) to conduct research on Image Super-Resolution problem.
I am always open to collaborations, research discussions, or just an interesting chat on AI & Robotics. Feel free to connect with me on LinkedIn or via email!
Interests
- Robotics & Computer Vision
- Deep Learning
- AI & Neuroscience
Education
-
MS in Robotics, August 2023- May 2025
Georgia Institute of Technology (Georgia Tech)
-
B.Tech in Electronics & Communication Engg, July 2016 - July 2020
Sardar Vallabhbhai National Institute of Technology, Surat
Recent
- May '25: Extended EgoMimic to study behavior and scene-level generalization from human data. Also, a part of active collaborative effort on collecting large-scale embodied human dat for robot learning (More details soon!)
- Feb '25: Meta AI did a story covering our work - EgoMimic. Check it out here. EgoMimic is also accepted at ICRA 2025
- Jan '25: Starting as Graduate Teaching Assistant for CS 3630: Intro to Perception and Robotics.
- Nov '24: Presented EgoMimic at Conference on Robot Learning (CoRL) 2024 (Munich, Germany)
- August '24: Graduate Teaching Assistant for CS6476: Computer Vision
- May '24: Summer Intern at Honda Research Institute, USA.
- Jan '24: Graduate Teaching Assistant for CS4476: Intro to Computer Vision.
- Nov '23: Started working with Prof. Danfei Xu at the Robot Learning and Reasoning Lab (RL2), Georgia Tech.
- August '23: Started MS in Robotics at Georgia Tech! Graduate Teaching Assistant for CS6476: Computer Vision.
- May '23: Proposal accepted at Google Summer of Code (GSoC)!
- May '23: Presented GDIP at ICRA 2023.
- Nov '22: Presented SRTGAN at CVIP 2022.
- Oct '22: Presented UVRSABI as a spotlight paper at CVCIE workshop, ECCV 2022.
- Sept '22: UVRSABI released as an open-source software at IHub Data Mobility Summit 2022 and would be used for deployment of civil inspection by CRRI (Govt. of India).